
大学生方程式赛车可变阿克曼转向几何设计摘要:本文介绍了不同类型的转向机构和基准,以及选择转向系统的方法。它也解释了一步一步的方法设计可变阿克曼转向几何。研究使用阿克曼和梯形系统的知识,转弯半径估计,转向努力计算,和RMS误差工具来设计和证明所选择的政策。结果包括设计可变阿克曼转向几何的详细流程,以及一组Matlab代码,用于计算转
大学生方程式赛车可变阿克曼转向几何设计
摘要:本文介绍了不同类型的转向机构和基准,以及选择转向系统的方法。它也解释了一步一步的方法设计可变阿克曼转向几何。研究使用阿克曼和梯形系统的知识,转弯半径估计,转向努力计算,和RMS误差工具来设计和证明所选择的政策。结果包括设计可变阿克曼转向几何的详细流程,以及一组Matlab代码,用于计算转弯半径、空间、内、外车轮角度和许多其他参数。本文提供了必要的知识,为那些谁是新的领域和那些感兴趣的转向设计的概述。
关键词:阿克曼转向,转向几何,设计,方程式学生,RMS误差。
SAE方程式赛车是由SAE国际主办的一项工程设计比赛,挑战学生们建造一辆从工程、性能和效率方面进行评估的方程式赛车。当涉及到高性能时,车辆动力学在实现可能的最佳结果方面发挥着至关重要的作用。与数学建模一样,良好的悬架和转向几何形状对汽车的性能至关重要。由于只有转向系统负责操纵,所以选择和设计一个健全的转向系统成为必要的任何汽车甚至驾驶。特别是对于地面车辆,转向机构不仅控制着车辆的机动,而且控制着车辆的机动,影响悬架特性的运动。因此,选择一个正确的机构与设计和制造车辆一样重要。在本文中,我们将研究转向机构的设计。首先,要知道转向系统根据使用的机构分为三大类。(如图1所示)
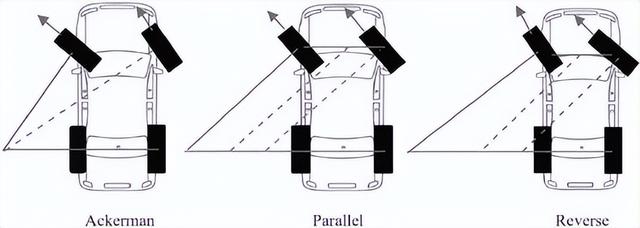

图1:转向机构类型图1 .阿克曼或亲阿克曼转向机构2。平行的转向装置3反阿克曼或反向阿克曼转向机构
正如我们所知,汽车是一个刚体,为了使它转弯,所有的轮胎应该围绕同一个中心转弯(如图1所示),否则轮胎将相互推或拉。这种推或拉的效果将迫使轮胎改变它们的位置,从期望的路径创建一个磨痕,它也将导致动量损失的汽车。因此,为了避免这种情况,并帮助汽车遵循上述模式的转向机构是基于不同的应用程序,因为每个机构都有自己的优点和缺点。
首先,根据轮胎磨砂量(即轮胎磨砂量)对Ackerman系统进行了相对区分。在汽车转弯时由每个机构产生)。阿克曼系统中没有清洗;磨砂效应在平行机制中增加,在反阿克曼系统中增加更多。此外,转弯所需的合适转向角总是与车轮载荷、路况、转弯速度(取决于转弯半径)和轮胎特性有关。由于汽车经历了高速和低速弯道,所以没有理想的转向机构可能,除非控制所有车轮的转向角是独立进行的。
选择阿克曼、平行或反阿克曼几何取决于车辆在转弯时的转弯速度。转弯速度决定着荷载的传递量,进而影响着车辆滑移角的重要性。由于滑移角在更高的载荷下具有更高的冲击力,因此会产生相应的侧向力[2]。转弯速度与载荷传递成正比。此外,在相似的载荷下,滑移角度的微小差异不会对赛车的性能(横向力)产生显著影响。因此,在低速弯道时,为了防止车轮擦蹭造成的动量损失,首选采用阿克曼机构。然而,当汽车在高速转弯时,由于高负载转移,保持足够的车轮滑移角比防止轮胎磨砂更重要,因此在这种情况下,平行或反阿克曼是首选。因此,系统决策是基于车辆的容量和弯道条件的比赛。
2011年,为了首先研究转向几何,Lili和同事试图制造一个阿克曼几何系统,但这一过程仅限于计算部件的长度,如拉杆,它没有比较性能[3]。2016年晚些时候,Malu和同事直接阐述了转向力矩臂角的影响,并使用迭代法对其[4]进行预测。
然后,Malik和同事在2017年进行了一项研究,讨论了影响转向特性的悬架参数,但本研究的局限性不是讨论转向参数[5]。同年Biswal等人设计了悬架参数和转向类型,但本研究仍缺乏对转向参数[6]的确定。同样,在同一年,Raut和同事们对能量传递系统和悬架参数进行了研究,但没有讨论转向参数[7]。之后,Gitay和同事在2018年再次讨论了参数的值,阐述了其谷值预测的迭代方法[8]。最后,在2018年底,Naveen和他的同事详细阐述了转向系统的类型和选择依据,但还是缺少一种转向参数的方法。因此,从这一点,很明显,一个精确的流动与正确的方法来找到转向参数一直缺失,这是本文的主要目标之一。本文提供了一个逐步确定和设计可变阿克曼几何转向参数的方法。它还包括一个微妙的概述,选择一个适当的转向机制。
首先,对转向机构的设计方法进行了讨论。包括阿克曼转向工况确定、转向半径估计、空间需求计算、梯形转向系统、可变阿克曼系统设计、交叉校验转向力值、最小化碰撞转向、拉杆内侧点的计算。然后阐述了转向机构的制造过程,并介绍了转向机构在汽车中的应用。随后对所得结果进行了讨论。同时,本文还介绍了一种转向器设计的分步法,该分步法适用于我们的方程式学生车的制造。并对理论值和解析值进行了比较。最后,在研究的基础上得出结论。
2方法
设计阿克曼几何的整个过程
可以分成以下九个简单的步骤。当按照顺序,这些步骤将导致一个全面定义和功能可变的阿克曼转向系统。最后,对转向机构的制造进行了讨论。
A.阿克曼转向工况
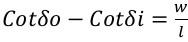
车辆的缓慢运动导致内轮和外轮之间的运动状态允许无滑移转弯。这种条件称为Ackerman条件,通常用式1表示。
(1)
式中为内轮转向角,为外轮转向角。
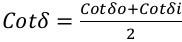
内车轮和外车轮是根据车削中心O[10]定义的。被驾驶车辆的质心将在一个半径为的圆周上转动,该半径由公式2确定。
(2)
其中是内侧和外侧转向角的cot-average。利用公式计算胶辊值
3.
(3)
称为车辆转弯半径[10]。图2显示了所有这些参数。
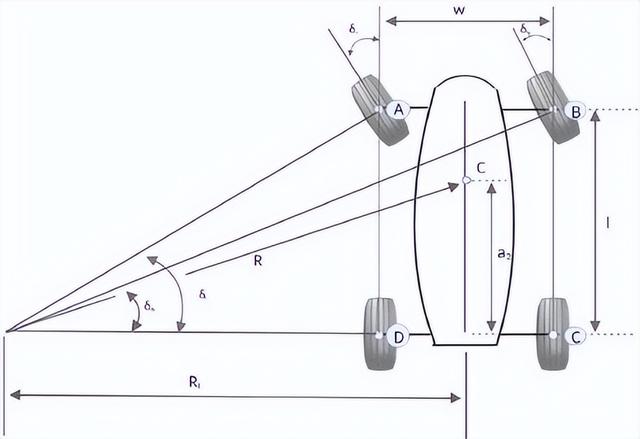
图2:亲阿克曼工况下车辆转弯图
一个Matlab代码1(附件)是在方程1,2,和3上生成的,以找到所需的阿克曼几何所需的一个轮子的旋转的价值。
B.转弯半径估计
转弯半径范围的估计是转向系统设计中另一个重要但较少讨论的步骤。对于一辆赛车来说,要想拥有最快的弯道和最短的圈速,就需要在该弯道的最大转弯半径上转弯。这是为了提供最大的刹车和加速能力。因此,研究了赛道上的所有弯道,并根据轮胎和发动机的规格确定每个弯道的最大可能转弯半径。从这些最大可能半径的列表中取最小的值,并进一步减小,以赋予车辆一些额外的转弯能力。为所需的最小转弯半径。这为任何几何形状的设计提供了转弯半径范围。
生成Matlab代码2和3(附录),以确定被转向轮角度的值,以及找到内轮所需的转角范围所需的转弯半径。
C.空间需求计算
计算所需的空间是必要的,以确保选择的转向系统适合赛道条件,然后进行进一步的计算。赛道的宽度应该总是大于系统工作所需的空间。通过应用图3中给出的简单三角函数,可以很容易地计算出所需的空间。
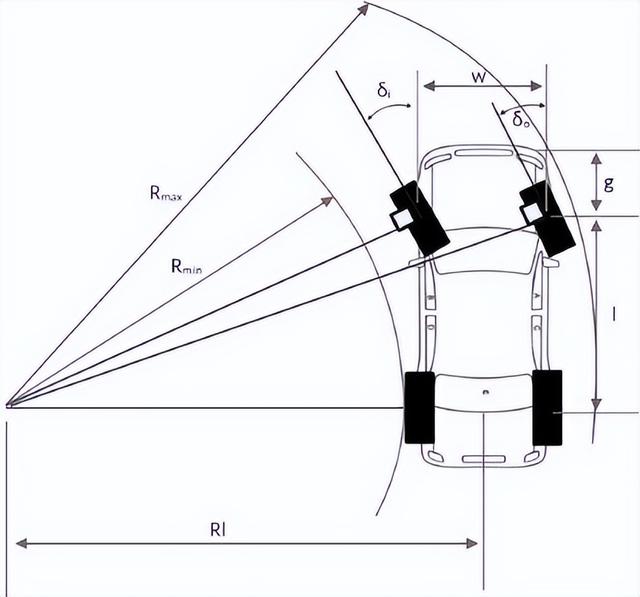
图3:Pro-Ackerman工况下整车转弯图
计算得到的关系式如式4、式5所示。

(4)
在那里,
(5)
ΔR是车辆转弯所需的空间。
一个Matlab代码4(附录)被设计来确定所需的转弯空间(附录),并与所有竞争的赛道尺寸进行比较。
D.梯形转向系统
通过简单的机械方法是不可能在任何情况下在弯道都达到阿克曼状态的,所以需要所有的轮子都独立操控。因此,系统的设计是为了尽可能接近地执行所需的阿克曼系统。
用于实现我们所要求的阿克曼几何形状的转向机构的类型是一个对称的四杆连杆机构,称为梯形转向机构如图4所示。
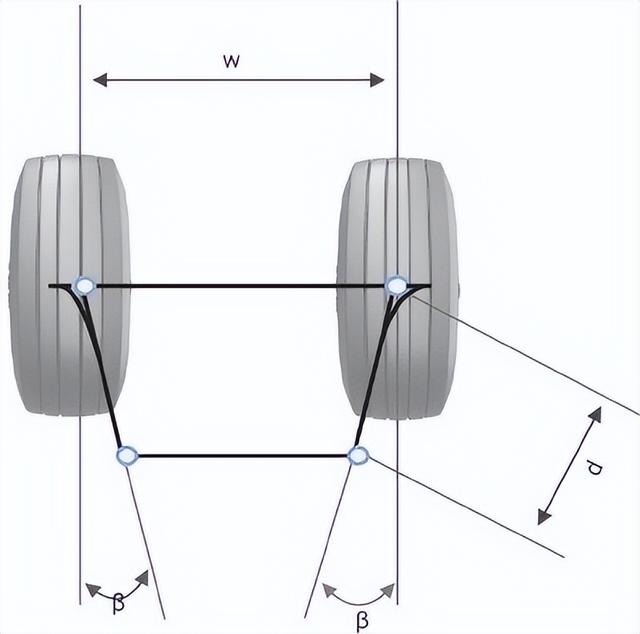
图4:梯形转向机构示意图
该机构有两个特征参数:角度和偏置臂长。梯形机构的转向位置也如图5所示,以说明内部和外部转向角度和。
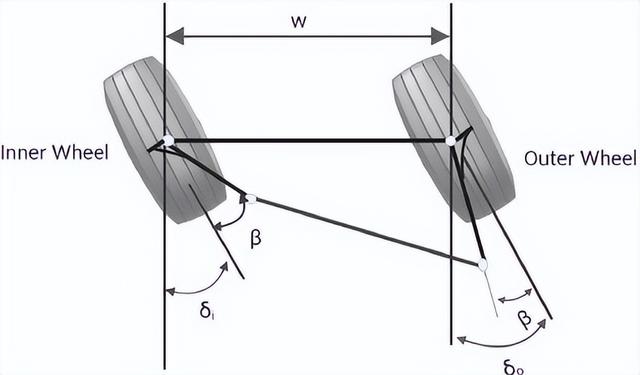
图5:梯形机构的操纵结构示意图
梯形转向机构的内外转向角的关系为

(6)
根据公式6[10]生成Matlab代码5(附录),获得所设计系统的内、外车轮转角值。
E.通过最小化阿克曼系统与梯形系统的均方根误差来设计梯形转向系统
由于一个转弯的各个工况下的阿克曼工况不可能同时实现,因此对整个转弯半径范围的转向进行[12]优化。这种使用均方根(RMS)误差的优化给了我们在整个转弯半径范围内从阿克曼系统可能的最小偏差。
对于内轮相同的转向输入,该概念将外轮所需的转向值和实现的转向值的RMS误差降至最低。这种均方根方法既考虑角度的正偏差,也考虑角度的负偏差,并使它们的值最小化。因此,提供最好的设计可能。
为了最小化RMS误差,生成了Matlab代码6(附件),以确定这种梯形系统的理想值(转向力矩臂角)和(转向力矩臂长)。
F.可变Ackerman系统设计
得到的值分别为和,可以有效地设计该系统的拉杆外点和转向力矩臂。为了在同一系统上有多个阿克曼效益,前拉杆上的各种外点的确定应该针对不同的转弯半径范围,这可以通过识别其他组和来实现。相同的Matlab代码用于不同的输入值的过程。
G.交叉检查转向努力值
转向臂长度和方向盘行程的值越小,所需要的努力就越多。臂长决策考虑了上述两个因素。选定转向臂长度后,在静态条件下计算转向力[4]。因此,驾驶员所能控制的转向力的最小值和最大值作为相应转向力矩臂长最小值和最大值的边界条件。在这个范围内选择几个值,并确定相应的角度,给出几个阿克曼几何点。一个包含所有这些点的单一力矩臂是快速改变阿克曼几何[11]的解决方案。
H.减少颠簸转向
在确定和值后,最后一个变量留在拉杆外点的坐标是它的高度。这个变量对悬架特性的影响大于对转向特性的影响。因此,该参数的决定是根据悬架图从运动学分析的系统。它的变化主要是为了最小化碰撞转向,同时检查其他图形,以避免任何不想要的悬架参数的变化。除了悬挂特性外,它还影响转向架的垂直设计和放置。因此,有时为了充分设计和适应系统,需要在性能上做出一点妥协。利用Adams Car对[13]轿车的悬架参数进行了分析和优化。
一、连接杆内侧点
连接拉杆外侧点和车轮瞬时中心(IC)的直线是内侧点的域。内侧点的高度决定了转向齿条的高度,因此所做的决定是基于转向齿条的定位[13,14]。放置好转向齿条后,转向齿条平面与外侧点到IC的连线的交叉点为内侧点。
J.材料选择与制造工艺
由于设计在波动载荷循环下运行,因此选择具有高疲劳强度和冲击韧性的材料是至关重要的。在学生方程式赛车中,重量是最重要的,因为增加重量需要更多的力量来克服材料的惯性;因此,部件的设计要考虑到强度与重量的比例,在比较的材料中,如低碳钢、铝6061和铝7075 T6,只有铝7075 T6具有上述理想的性能。
转向轴采用7075 T6铝合金。该公司从班加罗尔的Perfect Metalworks购买了一根直径为20mm的7075 T6铝棒,并提交了材料认证法案,在材料与制造实验室、SMEC、VIT、Vellore的车床上被压至17mm。该轴被交给GK工业,Vellore用于加工轴上的公花键,其尺寸来自快速释放上的母花键。该轴然后铣削与一个方形的轮廓配合锥齿轮,以传输运动和动力。
EN45材料购自孟加拉Perfect Metalworks,用于制作斜面。该材料是由GK工业,Vellore使用齿轮滚齿法加工。加工的锥齿轮给予Murli,金奈在52 HRC的情况下硬化。用于外壳的铝7075-T6材料被交给班加罗尔的Ushtara工业公司,在5轴数控机床上加工。用于制造20mm铝7075 T6轴的扣件直径为GK工业,用于加工键槽和花键配合,按照标准FSAE转向齿条,这是从KAZ赛车购买。
为了进行装配,首先在Satyamoorty工业将深沟球轴承压装在套管中,Vellore安装在一台20T液压机上。锥齿轮随后被压在各自的套管使用相同的机器。齿轮啮合是在同一行业的车床上完成的。在Vellore理工学院的车间,转向轴和转向柱与锥齿轮组合在一起,使用了一根木槌。在一根安全电线的帮助下,整个装置被固定起来。转向柱采用金属键与联轴器组装,联轴器通过将联轴器内花键与转向齿条上花键对齐来组装转向柱。图6描绘了设计装配的整个转向几何,然后在汽车中使用。
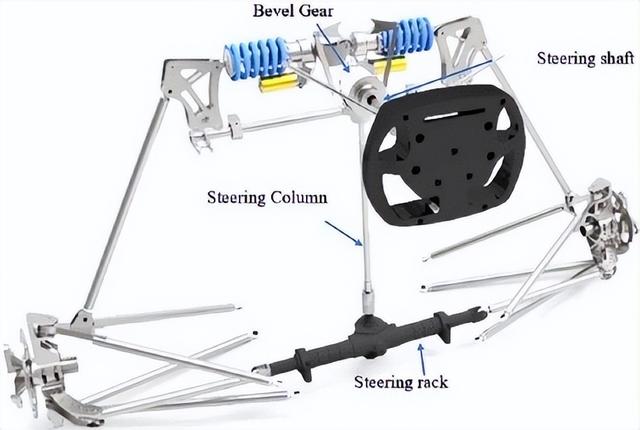
图6:转向几何组件示意图
3结果
首先,逐级设计变量阿克曼几何生成基于我们的汽车转向机构的设计。流程如下:
?选择正阿克曼?转弯半径范围的测定?内轮转角范围的测定对应的转弯半径范围转向力矩臂长范围的确定全操舵作用力范围。选择尽可能多的数值转向力矩臂长在范围内的可变阿克曼几何我们需要?在确定的内轮角度范围内,确定每个对应的转向力矩臂长值?重复整个过程,从转弯半径范围的另一组和值为所有需要的阿克曼几何,拉杆外点高度的测定,确定拉杆的内侧点对应于最常用的外侧点。该设计过程取得的成果符合我们的要求,PRV 18赛车分别在2018年澳大利亚大学生方程式大赛和2019年德国大学生方程式大赛中获得多项奖项。下面描述了一些基本结果。
系统的选择
在考虑了我们的比赛赛道和我们的车的能力考虑,我们最终决定设计一个阿克曼转向几何,以获得最紧的角落,并实现一个整体更好的性能。利用Matlab代码1(附录)得到的内、外车轮相对转角结果如图7所示。
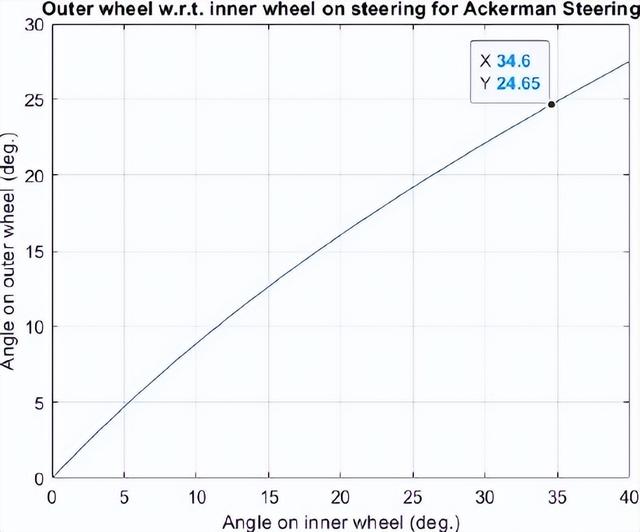
图7:阿克曼转向内、外轮对应角度图
B.转弯半径范围
我们的车的转弯半径范围是3000毫米到∞(当车辆在直线运动时)。的
续航里程足以发挥汽车的最大容量。
C.车轮转弯角度范围
对于对应的最小转弯半径3000 mm,通过Matlab代码得到最大内轮转弯角,取35°进行计算。这给了我们内轮从0到35度的转弯角度范围,对应于所需的转弯半径范围。该量程功能正常,所有间隙均满足要求。
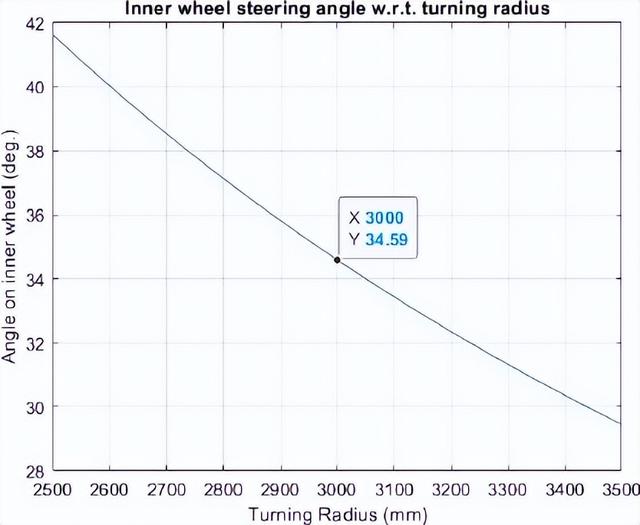
图8:对应转弯半径内轮上的角度图。
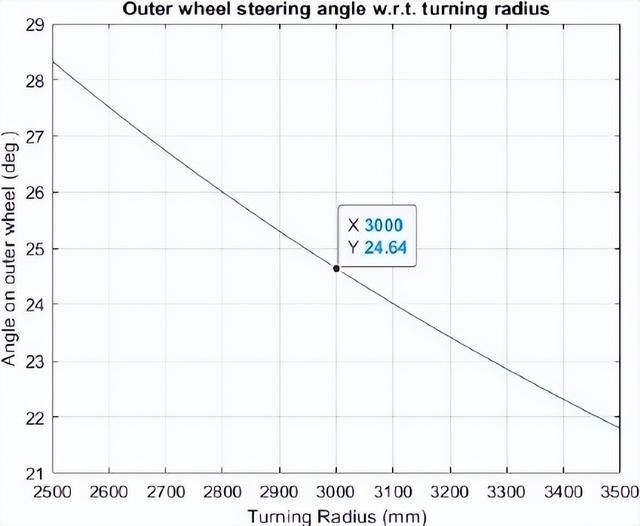
图9:对应转弯半径外轮上的角度图。
图8和图9分别为对应转弯半径内、外车轮所需的角度值,分别由Matlab代码2和3(附录)得到。此外,图8和图9中3000 mm转弯半径时的内、外车轮角值与阿克曼几何图7相同,验证了该方法及计算的正确性。
d . RMS最小化
Ackerman几何的第一个点的值为= 30.14= 116mm,最小RMS值为2.622 * 10?6。这一迭代能够让赛车在比赛的所有项目中运行,尽管多个外部点是为了更好的表现而确定的。
利用Matlab代码6(附录)得到所需的转向力矩臂长度,以实现最小的RMS误差,结果如图10所示。

图10:最小均方根误差图,绘制转向力矩角与均方根误差。
E.前视图悬挂和转向几何
图11中给出的草图代表了在Solidworks上设计的悬挂和转向几何的前视图。获得的几何连接的外点的拉杆到IC为找到内板点的拉杆给了我们最小可能的碰撞转向。
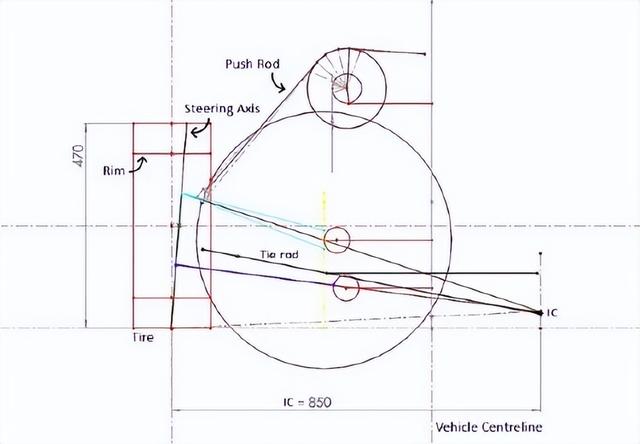
图11:方程式学生赛车悬挂几何设计的前视图
f .凹凸引导
采用Adams Car作为运动学分析软件进行所有悬架和转向的相关仿真,得到的碰撞转向图如图12所示。在凸度和下垂时获得的凸度分别为0 ~ 0.017度和0 ~ 0.045度。碰撞转向的值可以忽略,因此无效。
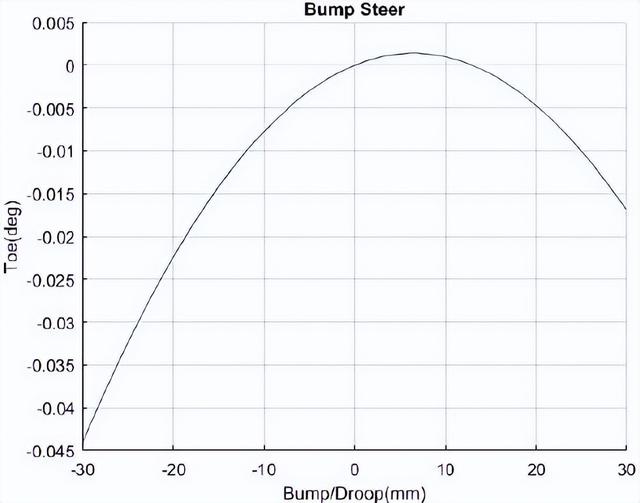
图12:凹凸转向图。绘制凹凸/下垂vs脚趾
g .梯形系统
利用Matlab代码5(附录)求出梯形系统设计实现的内、外车轮的相对转弯角度,得到的图形如图13所示。设计的梯形系统与所需的Ackerman系统非常接近,对比图7和图13,观察到最大可能偏差为1.3°。差别很小,可以在这个系统上运行汽车。
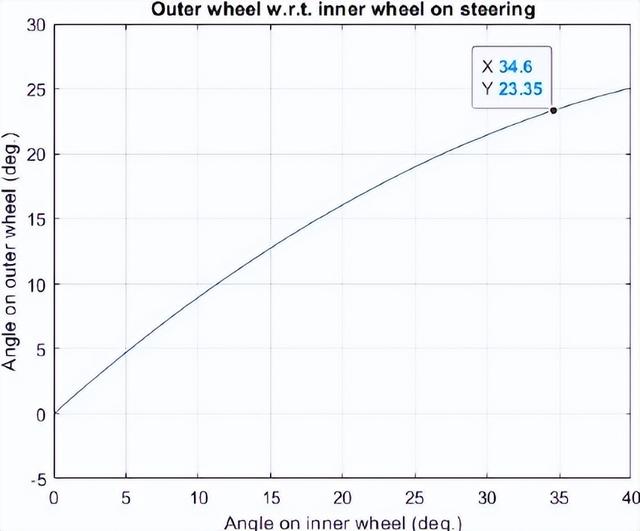
图13:所设计的梯形转向系统的内外轮角度图。
四。结论
本文有助于确定正确的选择转向机构的选择。本文通过对阿克曼几何中各种参数的确定,用不同的方法得到了许多图。经过大量的迭代和测试,我们生成了一种有效的方法来完成转向几何设计,同时考虑所有的转向和悬架特性。最重要的过程是计算RMS误差,用于确保最小磨砂损失。其他一些方法,如所需空间的计算和集成电路的纳入,在设计中考虑了实际的限制,以尽量减少碰撞转向。研究、仿真和仿真结果表明,该方法可为变阿克曼转向几何参数的决策和设计提供一种精简、精确的方法。在今后的六杆计算和滑移计算中,角度的加入将使该方法更加精确和实用。
如若转载,请注明出处:https://www.51buycar.cn/129044.html
相关推荐
-
abs线束(abs线束在什么位置)
本文目录abs线束是什么?abs供电电压解决方法?abs报数据总线故障?本田abs泵插头怎么取?雅阁abs失效保护继电器故障?福特福克斯abs泵插头怎么拆?吉普指南者abs泵插头怎么拔?现代ix35报abs电机故障?abs线束是什么?轮速传感器。頭條萊垍主要
-
正时皮带多少公里更换一次(正时皮带多少公里更换多少钱)
中国网汽车8月5日讯日前,标致雪铁龙(上海)管理有限公司根据《缺陷汽车产品召回管理条例》和《缺陷汽车产品召回管理条例实施办法》的要求,受委托向国家市场监督管理总局备案了召回计划。自即日起,召回2015年11月12日至2017年10月9日期间生产的部分配置1.2T发
-
一旦检测到与前车或行人距离过近,发出提示,辅助刹车,减少危险
全球首批标配博世9.3版ESP电子车身稳定系统、TCS牵引力控制、ABS刹车防抱死、HHC坡道起步辅助系统等行业领先的主动安全配置。而AEB自动紧急制动系统,自带行人保护之外,更增加了对自行车骑行人员的保护,让消费者的行车更为安全。而且,奇瑞瑞虎8的主动刹车功能,还是比较全方位的,在这种极端的路面上,我们的速度会
-
汽车前灯开关在哪里打开,汽车大灯清洗开关在哪里
关于灯光的操作我们在考驾照时都给我们讲过也考试过,但是我们买车后很多人操作不好,今天就和大家一起来讲解一下灯光的作用,每个灯光按键是什么意义?操作有哪些常见的误区?由于每个车按键可…
-
保时捷 911 E 渲染是对经典 935 的微妙致敬
保时捷911E渲染是对经典935的微妙致敬我们都同意911是最终的保时捷车型,当您听到保时捷时,您想到的就是这辆车。但在每个人都朝着电气化方向发展的时代,人们不得不问,保时捷911的未来是什么?设计师竭尽全力与911的设计理念保持一致,电动机位于后部,显然是向911致敬,而电池组位于汽车地板上,原因很明显(重心较低)。设计师强加的一个奇怪的技术决定是让电池风冷,考虑到电池管理在电
-
考驾照学时是什么意思,驾校学时是什么意思用天天去吗
老铁们,大家好,相信还有很多朋友对于考驾照学时是什么意思和驾校学时是什么意思用天天去吗的相关问题不太懂,没关系,今天就由我来为大家分享分享考驾照学时是什么意思以及驾校学时是什么意思用天天去吗的问题,文章篇幅可能偏长,希望可以帮助到大家,下面一起来看看吧!本文目录打学时是什么意驾校新规定的学时是怎么计算的驾校学时是什么意思用天天去吗科目一22学时是什么意思考驾照里面的24学时是什么意思打学
-
金彭电动车官方网站,金彭四轮代步电动车什么地方生产
大家好,关于金彭电动车官方网站很多朋友都还不太明白,今天小编就来为大家分享关于金彭四轮代步电动车什么地方生产的知识,希望对各位有所帮助!本文目录金彭四轮代步电动车什么地方生产金彭畅享5电动车多少钱金彭电瓶车说明书金彭jp1500zh-6a是多少管的金彭电动车怎么起步金彭四轮代步电动车什么地方生产金彭四轮代步电动车是在
-
400多万法拉利车辆打滑自燃成空壳!雨天司机开车请注意
400多万法拉利车辆打滑自燃成空壳!雨天司机开车请注意【新闻】近日,了解到,浙江绍兴,一辆法拉利在高速行驶途中,突然打滑,直接从最左车道撞向右边防护栏,撞停后车辆自燃,车辆被烧成了空壳。法拉利自燃事故现场监控
-
哈尔滨车管所,哈尔滨哪里有驾驶员自助体检机
大家好,今天小编来为大家解答哈尔滨车管所这个问题,哈尔滨哪里有驾驶员自助体检机很多人还不知道,现在让我们一起来看看吧!本文目录哈尔滨哪个车管所能换牌照哈尔滨哪个车管所有自助体检机哈尔滨上牌流程哈尔滨办理电动三轮牌照在那里哈尔滨哪里有驾驶员自助体检机哈尔滨哪个车管所能换牌照以下在哈尔滨都可以挽牌照地址:哈尔滨市公安局交警支队交管业务综合服务大厅黑龙江省
-
驾驶模式ECO SPORT COMFORT分别是什么意思(eco,sport驾驶模式是什么意思)
为了给不同驾驶风格的朋友们在不同驾驶工况下提供更加舒适、安全的驾驶体验,GL/GS有3种驾驶模式,当汽车处于不用驾驶模式时,发动机和变速箱的运行模式是不同的,主要是调整油门响应速度、发动机转速及变速箱换挡时机。下面小编就来简单的介绍下这三种不同的模式:No.1ECO模式模式特点:ECO为经济驾驶模式,省油,油门踏板反应没那么灵敏,动力输出较缓和建议使用:考虑油